


[Technique] - Sonde anémométrique et d’incidence non givrante (Episode 1)

Pourquoi cette sonde ?
En aéronautique, ainsi que dans d’autres domaines techniques, la mesure de la vitesse d’un fluide en écoulement relatif (vitesse anémométrique d’un aéronef, par exemple) est majoritairement réalisée par l’intermédiaire d’un tube Pitot associé à une prise de statique ou par l’intermédiaire d’une antenne de Prandtl également appelé Pitot-statique. Ces tubes captent la pression totale ou pression d’arrêt par conversion isentropique de la vitesse en pression. Les pressions statique et totale capturées sont transmises à un ou plusieurs capteurs de pression, par exemple une capsule anémométrique, qui mesure l’écart de pression appelé également pression dynamique, par un algorithme défini on peut alors connaître la vitesse de l’air ou la vitesse conventionnelle.
Cependant, de par sa conception, le tube de Pitot peut présenter quelques sensibilités aux conditions extérieures. Cette sonde vise donc la conception d’une invention destinée à remédier aux inconvénients de l’état de la technique, grâce à une nouvelle technologie de rupture, impliquant l’absence de tout orifice susceptible d’être obturé, et ainsi offrir à tout aéronef deux technologies de mesure de vitesse anémométrique différentes, gage de sécurité.
Principe de cette sonde
Pour concevoir cette nouvelle sonde, les travaux brevetés de la société Polyvionics et de Gérard Laruelle ont consisté à trouver et à exploiter un phénomène physique dépendant du paramètre à mesurer (la vitesse aérodynamique dans ce cas précis), comme nécessaire dans le cadre de la création d’un senseur.

Ce phénomène exploité concerne le comportement d’un fluide au sein d’une cavité effleurée, dont les fréquences des modes d’oscillations auto-entretenues dépendent de la vitesse. Ainsi, il suffit de placer un capteur au sein d’une cavité, et d’analyser les données dans le domaine fréquentiel, afin de déterminer la vitesse du fluide l’effleurant.
|
Illustration du phénomène exploit |
Design 3D (par extrusion) |


Illustration CFD
En effet, lorsqu’est déterminé la densité spectrale de puissance des mesures de pression, apparait un certain nombre de « pointes » de puissance, à des fréquences bien distinctes (correspondant chacune à un mode de vibration), comme le montre la figure ci-dessous.
|
Densité spectrale des oscillations auto-entretenues |

Or, il existe une relation bien précise entre ces fréquences de « pointes » et la vitesse d’écoulement du fluide. La multiciplicité des pics permet une redondance de l’estimation en vitesse qui devient robuste
D’un point de vue purement théorique et modélisation mathématique, il existe une formule, de Rossiter, permettant de relier les fréquences des oscillations auto-entretenues et la vitesse d’écoulement du fluide :
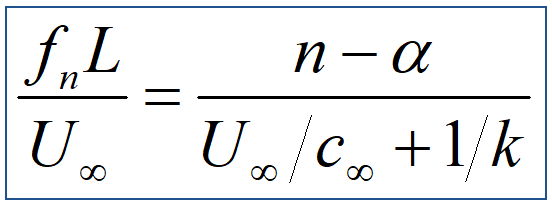
Avec,
- U∞ : Vitesse d’écoulement du fluide
- L : longueur de la cavité (D, sa hauteur)
- n : nombre entier représentant le mode
- k : constante empirique représentant le rapport entre la vitesse de propagation des tourbillons et la vitesse du fluide non perturbé (k = 0.57)
- α : constante empirique représente l'écart entre l'impact du tourbillon sur le bord de la cavité et l'émission de l'onde acoustique (α = 0.062xL/D)
- c∞ : vitesse du son dans l’environnement ambiant
Cette formule peut être utilisée dans un premier temps pour le calcul de la vitesse du fluide, à partir des mesures des capteurs de pression, puis affinée par régression non-linéaire.
A noter qu’il existe une formule plus évoluée, prenant en compte la modification des caractéristiques du fluide au sein de la cavité : la formule de Rossiter modifiée.

Conception du profil de sonde
Le profil de la cavité a également nécessité une approche innovante. En effet, une sonde ayant une forme de cavité rectangulaire ne pourrait être exploitable, car elle accumulerait les cristaux de nuage et givre, et n’apporterait donc aucune robustesse supplémentaire à la mesure de la vitesse, par rapport à l’état de l’art. L’étude de faisabilité déjà opéré a donc consisté à réaliser le design de son profil, avec :
- une inclinaison de la paroi aval afin de ne pas fixer les cristaux et givre ;
- une augmentation de la hauteur de la paroi aval afin de compenser l’inclinaison de celle-ci ayant un effet négatif sur le phénomène d’auto-oscillation à exploiter ;
- un fond courbe pour tangenter la trajectoire du fluide en oscillation ;
- une rampe éventuelle pour amener le fluide dans la cavité.
|
Profil de sonde |
Profil de sonde en CFD |


Le capteur dans la cavité de la sonde
Comme le montre une expérience réalisée par la NASA dans le cadre de comportements de fluide dans des baies d’aéronefs à munitions, la position du capteur des instabilités auto-entretenues n’a aucune influence sur les fréquences des modes et donc la détermination de la vitesse. En revanche, elle peut en avoir une sur la qualité des densités spectrales ; elle est donc à choisir avec précaution.

A ce titre, les simulations CFD ont montré que le capteur, afin de disposer d’une puissance d’oscillation maximale à exploiter, et ainsi exploiter des données ayant un meilleur rapport valeurs/bruit, devait être placé juste en dessous du point d’impact de la couche de cisaillement sur la paroi aval.


Le capteur utilisé au sein de la cavité de cette sonde pour déterminer les instabilités auto-entretenues est un hydrophone, car il dispose de toutes les caractéristiques requises, à savoir :
- fonctionnant avec l’air, mais insensible aux liquides toxiques (pour nettoyage), ou aux eaux de pluie durant les vols traversant les intempéries ;
- bande passante de 100 000 Hz maximum (nécessaire pour la détermination de la densité spectrale à des niveaux de fréquences compatibles avec les vitesses des aéronefs) ;
- pression de l’air pouvant atteindre 100 kPa ;
- conditions opérationnelles entre -60 et 80°C ;
- etc.
Il existe de nombreux systèmes prêts à l’utilisation pour tester la viabilité opérationnelle de prototypes, sans effort électronique/informatique :

Architecture électronique/informatique
Cette sonde doit disposer d’un système électronique/informatique dont le fonctionnement est le suivant :
- échantillonnage et stockage permanent des mesures capteur dans une mémoire glissante ;
- en cas de besoin d’une valeur de vitesse : calcul de la densité spectrale (PSD) des N dernières mesures et calcul de la vitesse air (plus N est grand, plus la qualité de la PSD est bonne, plus N est petit, plus la réponse de la sonde est rapide) ; les essais ont montré que le choix d’un N satisfaisant les contraintes opérationnelles avec un compromis qualité/rapidité est possible.

Conception 3D de la sonde
Une fois le profil de la sonde conçue, il existe 2 manières d’en faire un objet 3D : par extrusion ou par révolution, comme le montrent les dessins ci-dessous.

Bien entendu, l’objectif de cette sonde, si elle est utilisée dans un aéronef, est de pouvoir s’intégrer dans un emplacement identique à celui d’un tube Pitot, afin de faciliter son adoption (sans modifier grandement l’avionique ou la structure de celui-ci). De ce fait, des formes plus adaptées au fuselage de l’avion ont également été étudiées.


Essais en soufflerie, précisions en conditions opérationnelles
Les standards aéronautiques imposent une connaissance de la vitesse aérodynamique avec une erreur maximale de 0.50 %.
Des essais en soufflerie ont été effectués à l’Université de Cranfield, à une vitesse de 270 m/s, sur des runs de 10 secondes, avec un enregistrement de 16384 échantillons à une fréquence de 10 kHz sur environ 1.6 secondes.
En appliquant la formule de Rossiter de manière brute, on observe une erreur entre la théorie et la pratique comprise entre 0.36 et 0.59 %, sans aucune calibration de départ. Après un calibrage usine, et une connaissance parfaite des paramètres, l’erreur devient infinitésimale.
L’aspect essentielle de cette sonde est donc de déterminer l’influence d’erreurs de connaissance des paramètres de calcul, sur la précision de la vitesse anémométrique :
- une erreur d’estimation en température du fluide de 1°C implique une erreur de 0.06 % sur la mesure de la vitesse (évolution linéaire de l’erreur) ;
- une erreur d’estimation en facteur de récupération thermique de 5 % implique une erreur de 0.1 % sur la mesure de la vitesse (évolution linéaire de l’erreur) ;
- l’influence de l’humidité peut représenter un maximum de 0.1 % sur l’erreur de la mesure de la vitesse (évolution linéaire de l’erreur).
Toutes les erreurs d’estimation de ces paramètres n’empêchent donc pas la sonde de rester dans les standards requis (à savoir 0.5%).
Influence de l’incidence
Les études théoriques et les essais en soufflerie ont montré que l’influence de l’incidence avion (qui se manifeste par l’angle horizontal de direction du fluide sur la sonde) a une influence sur les mesures.

D’après des essais en soufflerie réalisés à la NASA, l’influence de ce paramètre est différente, en fonction du mode. De ce fait, il est envisageable de pouvoir estimer non seulement la vitesse du fluide, mais sa direction, en ayant connaissance d’au moins deux fréquences de mode : ce qui permettrait d’obtenir 2 équations à 2 inconnues (vitesse, angle) et donc de déterminer ces deux paramètres.
Une autre solution consiste à envisager une forme 3D de sonde, obtenue par révolution du profil (et non extrusion). Ce design permet en effet de disposer d’une asymétrie oscillatoire en cas de changement d’angle de fluide non nul, comme le montre les figures ci-dessous et l’animation provenant d’une étude de Gilles Bouchet du CNRS de Marseille sur l’invention :

Premier démonstrateur
Un premier démonstrateur de base, imprimé en 3D et équipé d’un petit microphone, a été réalisé afin de mettre en évidence le phénomène d’oscillations auto-entretenues, et vérifier qu’il est bien présent et exploitable dans cette forme particulière de cavité, comme l’a montré la simulation CFD.
Les mesures ont été échantillonnées à une fréquence importante de 44 KHz, et un calcul de densité spectrale de puissance (PSD) temps-réel a été mis en place, afin de vérifier la corrélation vitesse/pics de puissance.
Comme le montre la vidéo suivante, pour une vitesse constante, la fréquence des pics de puissance reste inchangée.
Conclusion
Cette invention est un complément idéal de la sonde Pitot puisqu’il permet à un aéronef d’utiliser 2 technologies différentes pour la mesure de la vitesse air. De plus, le marché de cette sonde anémométrique est potentiellement intéressant :
- les avions de ligne (Airbus, Boeing, etc.) ;
- les avions d’affaire, dont les conditions de vol ne sont pas très éloignées des avions de lignes ;
- les avions militaires (transport, radar, ravitailleurs, etc.) ;
- les chasseurs (le phénomène physique exploité par la sonde existant également en supersonique) ;
- les drones.



![[Divers] - Un petit Vidéo-Quiz sur le légendaire Concorde!](https://image.canalblog.com/F4dUgp6hItytUZnpjMcmIAoDJvg=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fstorage.canalblog.com%2F52%2F56%2F1435428%2F127783541_o.jpg)
![[Divers] - Mon vol avec Michel Polacco](https://image.canalblog.com/RUMAPImKh7gMfYK-kMAUYKmzc00=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fstorage.canalblog.com%2F29%2F37%2F1435428%2F125972935_o.jpg)
![[Hommage] - Revue de Presse autour de 1980 sur les premiers pas de Ariane I](https://image.canalblog.com/jfv8tKmXIySnoRZlYgUYnSHH9MI=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fstorage.canalblog.com%2F36%2F43%2F1435428%2F125355400_o.jpg)
![[Technique] - FROG : un petit démonstrateur GNC de lanceur réutilisable. Mais qu’est-ce le GNC ?](https://image.canalblog.com/3eJokgEfe6S0aNmnpqIxKK-s1vY=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fstorage.canalblog.com%2F49%2F22%2F1435428%2F124967568_o.jpg)
/https%3A%2F%2Fprofilepics.canalblog.com%2Fprofilepics%2F1%2F4%2F1438460.jpg)