


[Technique] Le ravitaillement en vol autonome

En avril dernier, a eu lieu le premier ravitaillement en vol autonome du drone X-47B, réalisé conjointement par Northrop Grumman et l’US Navy, au-dessus de la baie de Chesapeake.
Les Etats-Unis ont, en effet, commencé à développer la technologie ARR (Autonomous Aerial Refueling) depuis une dizaine d’années, l’armée américaine cherchant à rendre cette manoeuvre plus autonome, notamment dans le cadre de l’opération de ses futurs drones de combat (UCAV). Les premiers tests en vol avaient alors pu débuter en 2012, afin de valider l’approche technique choisie, avec, non pas un avion sans pilote, mais un Learjet servant de plate-forme au démonstrateur.
Quelles sont les méthodes utilisées ? Quelles sont les perspectives d’une telle technologie ? C’est ce que cet article vous propose d’approfondir.
Le contexte
Le ravitaillement en vol d’un aéronef se découpe en 4 phases :
- approche vers le panier de ravitaillement ;
- capture du panier de ravitaillement par la perche de l’aéronef ;
- maintien de position, une fois le panier de ravitaillement capturé ;
- détachement du panier de ravitaillement.

L’idée d’une telle technologie, à l’image de celle qui est développée par les Etats-Unis, est donc d’automatiser au maximum cette opération, de manière à pouvoir équiper non seulement les drones de cette capacité (ce qui augmenterait leur rayon d’action), mais également les avions de combat, afin d’alléger le travail des pilotes lors de missions difficiles.
La navigation
L’une des principales difficultés d’un tel accomplissement réside dans ce qu’on appelle la navigation : ce système particulier devant permettre au chasseur/UCAV de connaître indépendamment les Position/Attitude (PA) relatives non seulement du ravitailleur, mais également du panier, car dans les successions de phases d’une mission de ravitaillement, les guidages sont réalisés par rapport au réceptacle à capturer, ainsi qu’au tanker.
Il existe plusieurs technologies capables de réaliser une telle tâche.
La première consiste à équiper le ravitailleur et le chasseur d’une liaison de communication, de manière à ce que chacun des aéronefs puisse connaître les données de navigation de l’autre, provenant des capteurs de centrale inertielle et de GPS : Position/Vitesse relatives et données inertielles. A partir de là, chaque aéronef dispose des éléments nécessaires pour réaliser les premières manoeuvres du ravitaillement, excepté pour le panier.

Pour déterminer la position relative de ce dernier, le chasseur embarque une caméra optique (un traitement d’image approprié détermine l’emplacement du panier).
Cependant les tests ont montré que cette approche présente des inconvénients :
- elle est dépendante de tout système extérieur de géolocalisation (GPS, Galiléo…). L’éventuel brouillage ou panne du système de localisation (GPS, Galiléo) de l’une des plates-formes (ou des deux) a une conséquence sur la mission de ravitaillement ;
- elle nécessite communications avec le ravitailleur : une modification des ravitailleurs et des chasseurs est nécessaire. Quid de l’interopérabilité ?
- enfin, le traitement d’image ne dispose pas d’une robustesse compatible avec les normes industrielles aéronautiques, surtout en cas de conditions météorologiques dégradées (pluie, brouillard, etc.).
Une technologie de navigation plus moderne
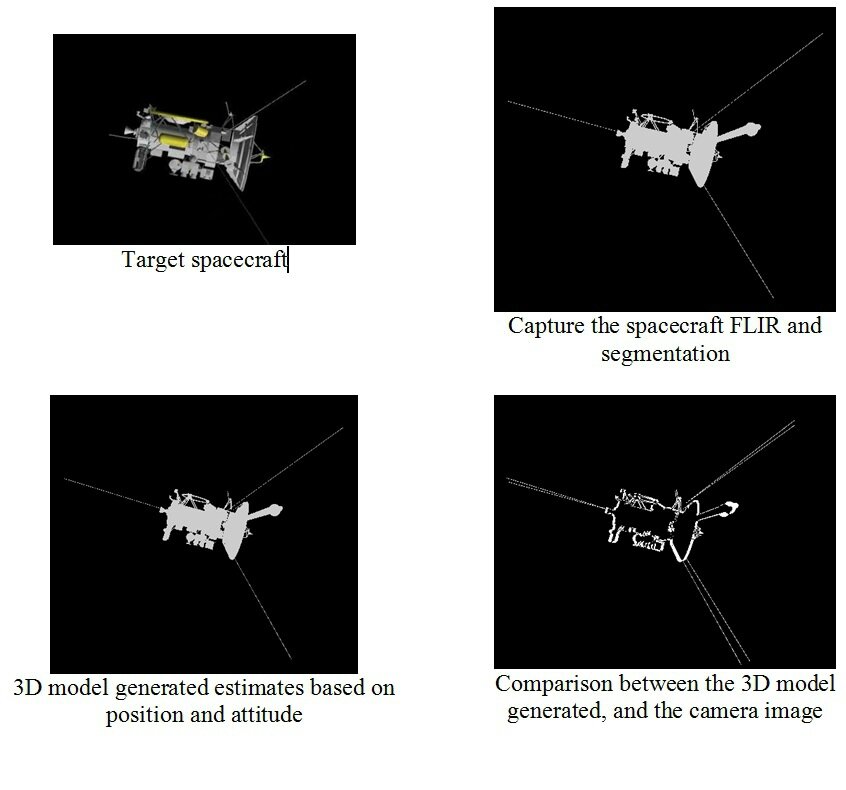
Une technologie plus moderne, basée sur l’infrarouge permet de contourner une partie importante de ces limitations. Un principe très astucieux est alors mis en oeuvre grâce à un algorithme qui réalise les opérations suivantes :
- capture du ravitailleur à l’aide d’une caméra infrarouge (1) ;
- extraction des contours du ravitailleur, ou segmentation (2). Il s’agit de mettre en évidence les formes des ravitailleur/panier afin de mieux les exploiter par la suite de l’algorithme ;
- détermination des position/attitude d’un modèle virtuel informatique 3D du ravitailleur (3), de manière à ce que son rendu coïncide parfaitement avec l’image infrarouge précédemment acquise. Pour ce faire, on utilise un optimisateur qui recherche ces données en comparant l’image réelle et l’image virtuelle ;
- déduction des position/attitude réelles du vrai ravitailleur par effet d’échelle et de calcul optique.

Une méthode identique est applicable au panier, pour ainsi connaître toutes les informations nécessaires au bon déroulement du ravitaillement.
D’autres approches sont également testées, comme la télémétrie laser, ou alors la stéréovision qui consiste à utiliser deux caméras pour réaliser une reconstruction 3D de l’environnement du chasseur, une autre technologie prometteuse.
Et le temps réel dans tout ça ?
Comme toujours, la question du temps réel est l’un des éléments critiques d’un tel système, compromis permanent avec la précision des estimations.
La tâche nécessitant l'échelle de temps la plus importante, concerne l’initialisation du système, car c’est à ce moment là, que les algorithmes de calcul doivent trouver les positions et attitudes initiales du ravitailleur et du panier, dans un espace de recherche complet.

D’après des essais réalisés à l’U.M.R. du C.N.R.S. Icube (Stéphane Querry sous la direction du Pr. Pierre Collet), cette initialisation sur monoprocesseur a pris environ une dizaine de secondes. Cependant, en approchant un ravitailleur par l’arrière, on peut avoir quelques informations sur son attitude relative (ce qui réduit l’espace de recherche), sachant qu’il vole en palier, et en tournant le dos au capteur infrarouge. Cette optimisation réduit considérablement le temps d’initialisation.
Autres retombées techniques d’un tel système de navigation
Un tel système de navigation peut également aider au vol en formation autonome, avec l'utilisation de capteur(s) Optique/IR embarqué(s) pour la localisation des appareils à proximité.
Des travaux ont également été réalisés, dans ce domaine particulier, pour l’appontage et/ou atterrissage autonome d'hélicoptère ou de drones VTOL sur porte-avions et/ou base. Un tel système installé au sol, ou sur porte-avions peut avoir l'avantage de renseigner un aéronef à voilures tournantes en phase d'approche pour atterrissage de sa position relative et de son attitude par rapport à l'emplacement visé, sans intervention de DGPS, tout en étant opérationnel de nuit.
Ce système, est-il applicable aux engins spatiaux... ?
Les rendez-vous orbitaux avec des engins non collaboratifs (non spécifiquement équipés pour se faire repérer) a, de nos jours, un avenir certain, pour deux raisons :
- désorbitation active de débris spatiaux ;
- ravitaillement de satellites en fin de vie.
De ce fait, une avionique capable de pouvoir guider un engin spatial vers un objet en orbite est nécessaire, et les développements présentés dans cet article sont tout à fait adaptés à cette application !
Seulement, deux verrous technologiques restent à lever :
- les objets spatiaux sont souvent symétriques, voire cylindriques pour certains, et l'algorithme visuel chargé du calcul de l'attitude pourrait se perdre, étant donné que plusieurs orientations différentes de la "cible" auraient une même image infrarouge ;
- les objets spatiaux sont souvent en rotation (type brochette) pour éviter que le soleil ne chauffe trop un seul et même coté (150°) et que l’ombre spatial ne refroidissement trop un autre coté (-150°). De ce fait, l’objet a déjà procédé à une certaine révolution, le temps de l’initialisation des calculs ; phénomène qui doit donc être pris en compte.
(Suivez-nous sur Facebook https://www.facebook.com/blog.survols)
(Suivez-nous sur Twitter https://twitter.com/Blog_Survols)



![[VIDEOS] Le pilotage d'un F-16 Fighting Falcon](https://image.canalblog.com/FV_LPQ15ZbwdpwIZFkc-njH4Bs8=/400x260/smart/filters:no_upscale()/http%3A%2F%2Fstorage.canalblog.com%2F17%2F60%2F1435428%2F120107202_o.jpg)
![[Divers] - Un petit Vidéo-Quiz sur le légendaire Concorde!](https://image.canalblog.com/F4dUgp6hItytUZnpjMcmIAoDJvg=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fstorage.canalblog.com%2F52%2F56%2F1435428%2F127783541_o.jpg)
![[Divers] - Mon vol avec Michel Polacco](https://image.canalblog.com/RUMAPImKh7gMfYK-kMAUYKmzc00=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fstorage.canalblog.com%2F29%2F37%2F1435428%2F125972935_o.jpg)
![[Technique] - Sonde anémométrique et d’incidence non givrante (Episode 1)](https://image.canalblog.com/J8IYUEMJiAYa2PwW-JZcB3s04bY=/400x260/smart/filters:no_upscale()/https%3A%2F%2Fstorage.canalblog.com%2F32%2F30%2F1435428%2F125583367_o.png)
/https%3A%2F%2Fprofilepics.canalblog.com%2Fprofilepics%2F1%2F4%2F1438460.jpg)